Partant pour un long voyage en voilier de plusieurs années, je voulais avoir un pilote de secours en cas de problème sur le pilote principal B&G (moteur + électronique). Plusieurs alternatives: un régulateur d’allure, idée séduisante mais très mal adaptée à mon voilier avec sa plage arrière qui se rabat. Un autre pilote neuf (moteur + électronique) solution très onéreuse, pour un matériel identique à mon système actuel B&G j’aurai du débourser plus de 9000€ !
Restait un Pilote de remplacement à bas coût basé sur des composants électroniques montés par moi même et un logiciel Open Source, ce choix s’est logiquement imposé à moi car je bricole un peu en électronique et mon ancien métier d’ingénieur en informatique pourrait me faciliter grandement la tache. Mon choix s’est donc porté sur Open Plotter + PyPilot qui fonctionne sur Raspberry PI + Arduino.
Open Plotter + PyPilot c’est quoi? Une série de logiciels Open Source donc gratuits faits répondre à tous les besoins en navigation. Open Plotter intègre donc OpenCpn pour la partie Cartographie et l’affichage des capteurs (anémomètre, gps, vent réel et apparent profondeur etc…. ) Mais surtout OpenPlotter intègre tout l’interfaçage avec tous les capteurs et le pilote automatique. Gestion des interfaces capteurs inertiels pour le pilote , intégration du réseau NMEA 2000 et 0183 avec SignalK qui n’est autre qu’un service qui regroupe toutes ces informations.
Les principaux éléments de OpenPlotter
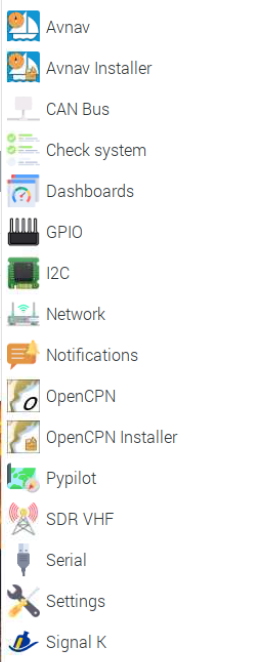
Avnav est un système de prise de main à distance (comme Vnc intégré à OpenPlotter) qui permet d’afficher sur tablette ou smartphone ou ordinateur OpenPlotter et OpenCpn.
Can Bus, GPIO, I2C, Network, Serial permettent de gérer différents capteurs et le réseau connecté au RaspBerry.
OpenCpn système Open Source de navigation et cartographie qui fait à peu près la même chose que Navionics.
PyPilot permet de gerer le fonctionnement du pilote automatique.
SignalK est un service qui chapote tous les informations venant des différents capteurs et du réseau NMEA du voilier.
Une rapide synthèse sur OpenPlotter et PyPilot https://www.bateaux.com/article/40676/pypilot-le-pilote-de-secours-open-source-qui-a-sauve-notre-voyage
SOFTWARE
open source (gratuit) voir https://openmarine.net/openplotter et https://pypilot.org/
HARDWARE pour avoir un système de Pilote automatique entièrement autonome
2 alternatives: commander les composants sur le site du concepteur de pypilot: https://pypilot.org/ dans ce cas on a des composants un peu plus chers et plus prêts à l’emploi mais en ce moment ce site de vente en ligne fermé… Ou autre alternative on peut commander ces composants sur amazon. C’est possible où que l’on soit, on bricolera un peu plus mais on sera entièrement autonome, j’ai pris pour le moment cette option.
MOFSET pour Clutch moteur : https://www.amazon.fr/dp/B07HBL6VZ9 (7 €)
PONT H: https://www.amazon.fr/gp/product/B07ZCS6YP9 (12 €)
Capteur inertiel MPU 9250 https://www.amazon.fr/dp/B0785D9BWQ (15 €) ou mieux car plus récent ICM 20948: https://www.gotronic.fr/art-module-icm20948-9-dof-pim448-31595.htm (16€)
Arduino nano https://www.amazon.fr/dp/B01MS7DUEM (entre 2€ sur AliExpress et 19 € sur amazon)
Moteur de test https://www.amazon.fr/dp/B07HP6PYS3 (13 €)
Raspberry PI 4 8Go https://www.amazon.fr/dp/B09NM7PHKG (279 €)
Ecran HD pour Raspberry PI4 https://www.amazon.fr/dp/B09MCWKPRJ (109 €)
Clavier souris sans fil pour PI4 https://www.amazon.fr/dp/B0BPLG3Z8C (25 €)
Donc pour un budget de moins de 500 € (environ 80 € de composants électroniques + 390 € Raspberry PI et écran) on a un système complet pour monter un pilote auto
Afin que ce système soit entierement autonome par rapport à l’existant B&G j’ai également acheté un moteur de pilote auto adapté à la taille de mon voilier de 12,42 Mètres qui pése environ 9 tonnes.
https://www.svb-marine.fr/fr/raymarine-verin-lineaire-electromecanique-pour-pilote-type-1-12-v.html (2100 €)
Autre avantage ce moteur pourrait être aussi utilisé en secours si mon moteur de pilote principal lache, il utilise le même sytème de fixation sur l’axe de la meche de safran.
On pourrait aussi très bien imaginer d’utiliser le moteur du pilote existant pour brancher tout le système PyPilot et un rasberry plus aucien à 90 € dans ce cas le budget total serait d’environ 300 €….! Comparez par rapport à un système B&G ou Raymarine, il n’y a pas photo…..
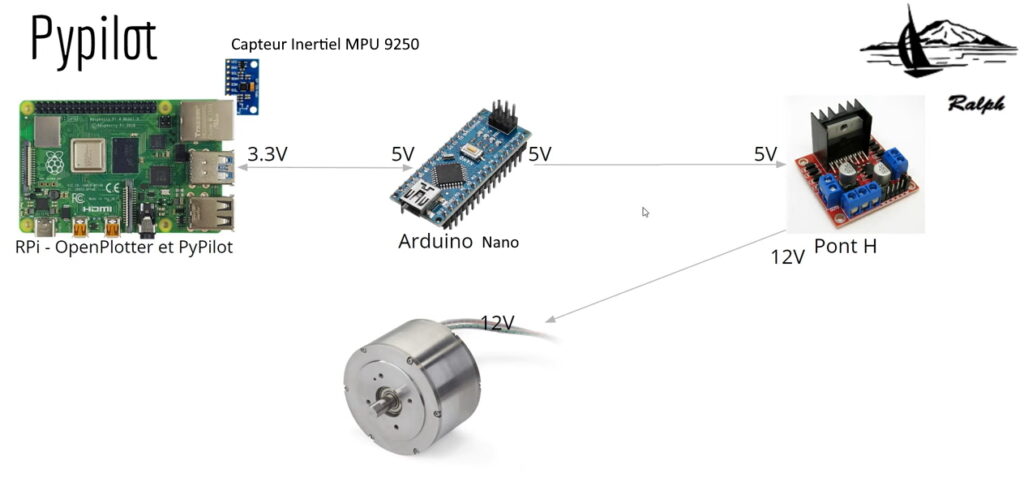
PRINCIPE GÉNÉRAL de PyPilot pour gérer le moteur du pilote automatique
https://www.youtube.com/playlist?list=PLE6SYEQA73XbXOBcT63-u7Q3Ek4BbyMui
Premiers tests de mise en place du système OpenPlotter + Pypilot

Le tout semble fonctionner: quand je bouge le capteur inertiel qui intègre un compas le moteur se met en marche. Reste à mettre en place cela sur mon voilier; un peu le sécuriser, le mariniser et brancher tout ce bric à brac sur le vrai moteur du pilote auto. Il y a encore du boulot!… Je ferai d’autres articles là dessus jusqu’à l’utilisation en condition de navigation réelle.
Je pense que je vais partir sur les principes de ce schéma de montage:

LIENS:
Chaine YouTube en français Bricolage à Bord, sur les principes et installation d’OpenPlotter et PyPilot:
https://www.youtube.com/playlist?list=PLE6SYEQA73XbXOBcT63-u7Q3Ek4BbyMui
A mon avis le point délicat est la liaison et le contrôle du moteur du pilote via l’Arduino nano et le pont h, quelques références:
La carte Pont H IBT 2 que j’utilise avec Arduino: http://www.hessmer.org/blog/2013/12/28/ibt-2-h-bridge-with-arduino/
Généralités sur contrôle moteur avec arduino et pont H: https://youtu.be/ygrsIqWOh3Y
Forums sur la question Pont H IBT 2 / arduino nano / PyPilot:
https://forum.openmarine.net/showthread.php?tid=3388
https://forum.openmarine.net/showthread.php?tid=1840
A bientôt pour d’autres articles plus détaillés sur l’installation et l’utilisation de OpenPlotter / PyPilot sur mon voilier.